Knowledge Center
Popular Search
esp32modespthefredo
Wireless Switch Units
Table of Contents
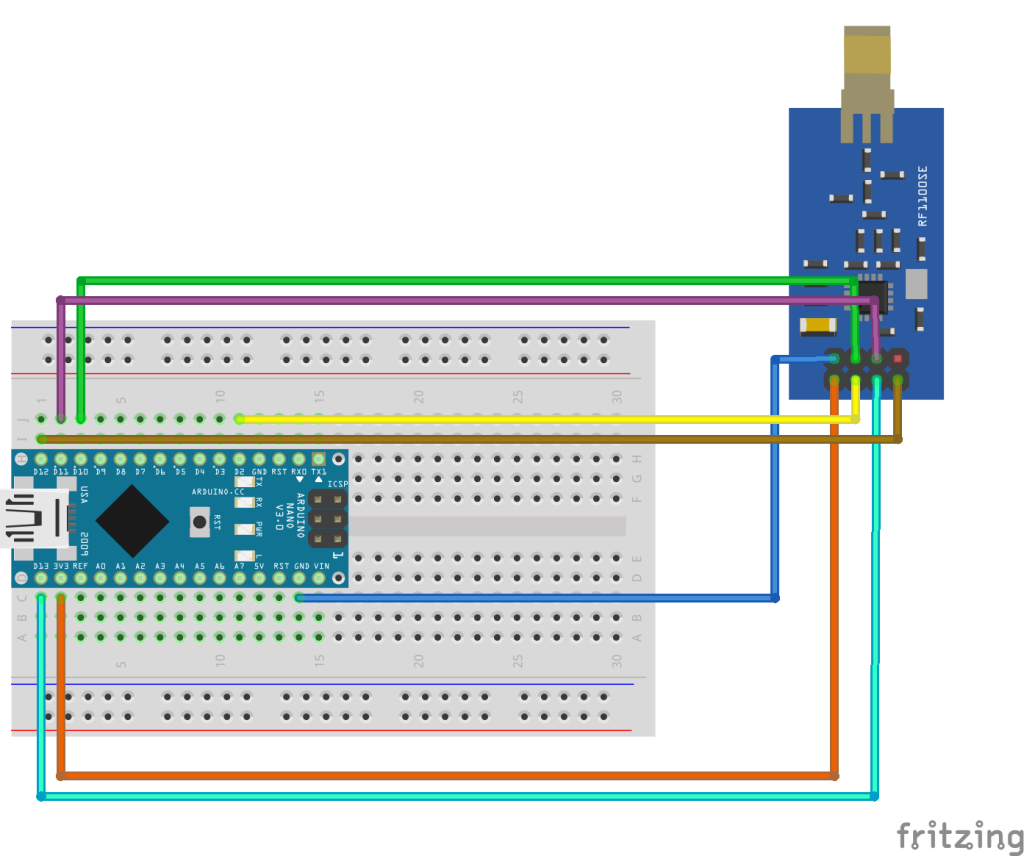
Wireless switch units controlled by a microcontroller like Arduino/ESP and for example a CC1101 transciever.
Arduino Library #
Using CC1101 module: https://domoticx.net/docs/433mhz-cc1101-transciever
Silvercrest IAN 276299, IAN 303937 #

Arduino code
#include <ELECHOUSE_CC1101_SRC_DRV.h>
#define GDO0_PIN 2 // CC1101 GDO0 on D2
// Pulse timing (in microseconds) SILVERCREST
const unsigned int T0H = 440; // Pulsduur bit 0 HIGH
const unsigned int T0L = 1040; // Pulsduur bit 0 LOW
const unsigned int T1H = 1240; // Pulsduur bit 1 HIGH
const unsigned int T1L = 300; // Pulsduur bit 1 LOW
const unsigned int SYNC_HIGH = 520; // Sync puls HIGH
const unsigned int SYNC_LOW = 2140; // Sync puls LOW
void setup() {
Serial.begin(115200);
Serial.println(F("Init CC1101 TX met GDO0 direct pulsen"));
ELECHOUSE_cc1101.getCC1101();
ELECHOUSE_cc1101.Init();
ELECHOUSE_cc1101.setMHZ(433.92);
ELECHOUSE_cc1101.setModulation(2); // ASK/OOK
ELECHOUSE_cc1101.SetTx();
pinMode(GDO0_PIN, OUTPUT);
digitalWrite(GDO0_PIN, LOW);
delay(100);
}
void transmitHigh(unsigned int duration) {
digitalWrite(GDO0_PIN, HIGH);
delayMicroseconds(duration);
}
void transmitLow(unsigned int duration) {
digitalWrite(GDO0_PIN, LOW);
delayMicroseconds(duration);
}
void sendBit(bool bit) {
if (bit) {
transmitHigh(T1H);
transmitLow(T1L);
} else {
transmitHigh(T0H);
transmitLow(T0L);
}
}
void sendCode(unsigned long code) {
for (int repeat = 0; repeat < 10; repeat++) {
for (int i = 23; i >= 0; i--) {
bool bit = (code >> i) & 1;
sendBit(bit);
}
// Sync-puls
transmitHigh(SYNC_HIGH);
transmitLow(SYNC_LOW);
}
Serial.println(F("Code sent!"));
}
void loop() {
sendCode(0xFFB2AC); //ON (LEARN)
Serial.println(F("ON"));
delay(2000);
sendCode(0xF2CB2C); // OFF
Serial.println(F("OFF"));
delay(2000);
}Flamingo SF-501P #

Additional Library: arduino-sf501remote
Github: https://github.com/arjhun/arduino-sf501remote
Arduino code
#include <ELECHOUSE_CC1101_SRC_DRV.h>
#include "sf501-remote.h"
Sf501Remote remote;
const int remoteId = 25134;
#define GDO0_PIN 2 // GDO0 van CC1101 verbonden met D2
// Pulse settings
const unsigned int pulseLength = 190;
const unsigned int shortPulse = 2 * pulseLength;
const unsigned int longPulse = 7 * pulseLength;
const unsigned int startGap = 14 * pulseLength;
const unsigned int interFrameGap = 2660; // optioneel
void setup() {
Serial.begin(115200);
Serial.println("Start SF501 with CC1101");
// Init CC1101
ELECHOUSE_cc1101.getCC1101();
ELECHOUSE_cc1101.Init();
ELECHOUSE_cc1101.setMHZ(433.92);
ELECHOUSE_cc1101.setModulation(2); // OOK/ASK
ELECHOUSE_cc1101.SetTx();
pinMode(GDO0_PIN, OUTPUT);
digitalWrite(GDO0_PIN, LOW);
remote.startTransmitter(GDO0_PIN);
delay(100);
}
void loop() {
int button = 1; // up to 15 buttons (4 bits)
remote.sendCommand(remoteId, button , true);
Serial.println("Send ON");
delay(2000);
remote.sendCommand(remoteId, button , false);
Serial.println("Send OFF");
delay(2000);
}Elro Home Easy HE-874 (Flamingo) #
Arduino code
#include <ELECHOUSE_CC1101_SRC_DRV.h>
#define GDO0_PIN 2 // GDO0 of CC1101 module
// Compiler only coding
#define FREMOTE 2 /* Amount supported remotes */
#define FUNITS 4 /* Amount of units supported per remote */
#define FCMDN 2 /* Amount of CMD 0 = On, 1 = Off */
int rfPin = 2;
uint32_t fdev[FREMOTE][FUNITS][FCMDN] = {0xD9762A10, /* Remote 0, Unit A, On */
0xDAA47850, /* Remote 0, Unit A, Off */
0xDBDA22E0, /* Remote 0, Unit B, On */
0xDBA27220, /* Remote 0, Unit B, Off */
0x19BFD260, /* Remote 0, Unit C, On */
0x195EEAA0, /* Remote 0, Unit C, Off */
0x984CC650, /* Remote 0, Unit D, On */
0x9A8C1050, /* Remote 0, Unit D, Off */
0xDBFFFE90, /* Remote 1, Unit A, On */
0xD91CEF10, /* Remote 1, Unit A, Off */
0xDBC52FA0, /* Remote 1, Unit B, Aan */
0xD9E35160, /* Remote 1, Unit B, Off */
0x19B0FE60, /* Remote 1, Unit C, On */
0x19682B20, /* Remote 1, Unit C, Uit */
0x9924E7D0, /* Remote 1, Unit D, On */
0x9BA928D0 /* Remote 1, Unit D, Uit */
};
// Define Flamingo_send variables / constants
int fpulse = 300; /* Pulse witdh in microseconds */
int fretrans = 5; /* Code retransmission */
uint32_t fsendbuff;
uint32_t fdatabit;
uint32_t fdatamask = 0x80000000;
void Flamingo_Send(int fhousec, int funitc, int fcmd) {
// Test if used codes are valid
if ((funitc < 1) || (funitc > 2)) { // check if unit code between 1-2 (Remote 0 of 1)
Serial.print("Unit error: ");
Serial.println(funitc);
return;
}
else {
funitc = funitc - 1; // To address right code in array
}
if ((fhousec < 0) || (fhousec > 3)) { // check if house code between 1-4 (A-D)
Serial.print("House error: ");
Serial.println(fhousec);
return;
}
if ((fcmd < 0) || (fcmd > 1)) { // check if command = 0 (off) or 1 (on)
Serial.print("Command error: ");
Serial.println(fcmd);
return;
}
// End test used codes
Serial.println("Send Flamingo command ");
Serial.print("Flamingo House/Device code = :");
Serial.println(fhousec);
Serial.print("Flamingo Unit/remote code = :");
Serial.println(funitc);
Serial.print("command = :");
Serial.println(fcmd);
Serial.println();
// Send Command
for (int nRepeat = 0; nRepeat <= fretrans; nRepeat++) {
fsendbuff = fdev[funitc][fhousec][fcmd];
// send SYNC 1P High, 15P low
Serial.println("Send sync");
digitalWrite(rfPin, HIGH);
delayMicroseconds(fpulse * 1);
digitalWrite(rfPin, LOW);
delayMicroseconds(fpulse * 15);
// end send SYNC
// Send command
for (int i = 0; i < 28; i++) // Flamingo command is only 28 bits */
{
// read data bit
fdatabit = fsendbuff & fdatamask; // Get most left bit
fsendbuff = (fsendbuff << 1); // Shift left
if (fdatabit != fdatamask)
{ // Write 0
digitalWrite(rfPin, HIGH);
delayMicroseconds(fpulse * 3);
digitalWrite(rfPin, LOW);
delayMicroseconds(fpulse * 1);
}
else
{ // Write 1
digitalWrite(rfPin, HIGH);
delayMicroseconds(fpulse * 1);
digitalWrite(rfPin, LOW);
delayMicroseconds(fpulse * 3);
}
}
}
}
void setup() {
Serial.begin(115200);
Serial.println("Start...");
// Init CC1101
ELECHOUSE_cc1101.getCC1101();
ELECHOUSE_cc1101.Init();
ELECHOUSE_cc1101.setMHZ(433.92);
ELECHOUSE_cc1101.setModulation(2); // OOK/ASK
ELECHOUSE_cc1101.SetTx();
pinMode(GDO0_PIN, OUTPUT);
digitalWrite(GDO0_PIN, LOW);
delay(100);
}
void loop() {
Flamingo_Send(0, 1, 1);
Serial.println("SEND ON");
delay(2000);
Flamingo_Send(0, 1, 0);
Serial.println("SEND OFF");
delay(2000);
}KlikaanKlikuit PAR-1000 (codeschijf) #

Additional Library: RemoteSwitch-arduino-library
Github: https://github.com/jccprj/RemoteSwitch-arduino-library
Arduino code
#include <ELECHOUSE_CC1101_SRC_DRV.h>
#include <RemoteSwitch.h>
#define GDO0_PIN 2 // GDO0 van CC1101 verbonden met D2
//Intantiate a new ActionSwitch remote
ActionSwitch actionSwitch(GDO0_PIN);
//Intantiate a new KaKuSwitch remote
KaKuSwitch kaKuSwitch(GDO0_PIN);
//Intantiate a new Blokker remote
BlokkerSwitch blokkerSwitch(GDO0_PIN);
void setup() {
Serial.begin(115200);
Serial.println("Start...");
// Init CC1101
ELECHOUSE_cc1101.getCC1101();
ELECHOUSE_cc1101.Init();
ELECHOUSE_cc1101.setMHZ(433.92);
ELECHOUSE_cc1101.setModulation(2); // OOK/ASK
ELECHOUSE_cc1101.SetTx();
pinMode(GDO0_PIN, OUTPUT);
digitalWrite(GDO0_PIN, LOW);
delay(100);
}
void loop() {
kaKuSwitch.sendSignal('A', 1, true);
Serial.println("SEND ON");
delay(2000);
kaKuSwitch.sendSignal('A', 1, false);
Serial.println("SEND OFF");
delay(2000);
}