







- Beschrijving
- Aanvullende informatie
- Q & A
Beschrijving
Wordt geleverd met 1×5 male headerpins
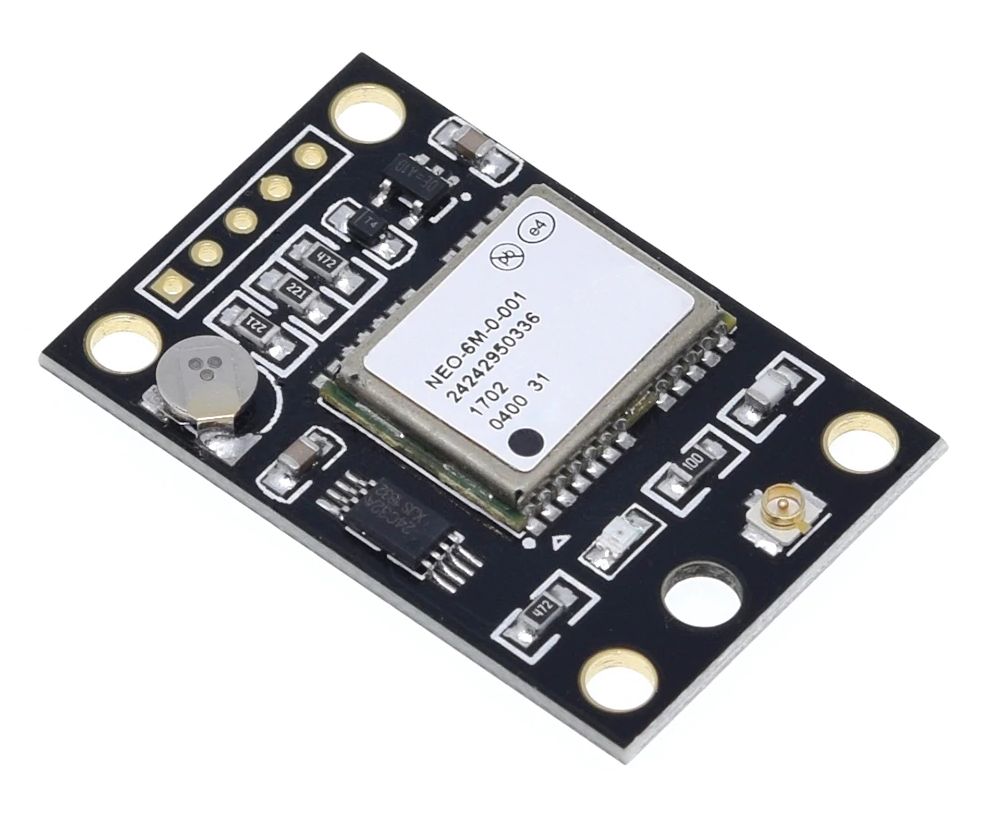
NEO-6M GPS Chip. It can track up to 22 satellites on 50 channels and achieves the industry’s highest level of sensitivity i.e. -161 dB tracking, while consuming only 45mA supply current. Unlike other GPS modules, it can do up to 5 location updates a second with 2.5m Horizontal position accuracy. The u-blox 6 positioning engine also boasts a Time-To-First-Fix (TTFF) of under 1 second. One of the best features the chip provides is Power Save Mode(PSM). It allows a reduction in system power consumption by selectively switching parts of the receiver ON and OFF. This dramatically reduces power consumption of the module to just 11mA making it suitable for power sensitive applications like GPS wristwatch. The necessary data pins of NEO-6M GPS chip are broken out to a 0.1″ pitch headers. This includes pins required for communication with a microcontroller over UART. The module supports baud rate from 4800bps to 230400bps with default baud of 9600.
Position Fix LED Indicator. There is an LED on the NEO-6M GPS Module which indicates the status of Position Fix. It’ll blink at various rates depending on what state it’s in: No Blinking – It’s searching for satellites; Blink every 1s – Position Fix is found(The module can see enough satellites).
3.3V LDO Regulator. The operating voltage of the NEO-6M chip is from 2.7 to 3.6V. But the good news is that, the module comes with MIC5205 ultra-low dropout 3V3 regulator from MICREL. The logic pins are also 5-volt tolerant, so we can easily connect it to an Arduino or any 5V logic microcontroller without using any logic level converter.
Battery and EEPROM. The module is equipped with an HK24C32 two wire serial EEPROM. It is 4KB in size and connected to the NEO-6M chip via I2C. The module also contains a rechargeable button battery which acts as a super-capacitor. An EEPROM together with battery helps retain the battery backed RAM (BBR). The BBR contains clock data, latest position data(GNSS orbit data) and module configuration. But it’s not meant for permanent data storage. As the battery retains clock and last position, time to first fix (TTFF) significantly reduces to 1s. This allows much faster position locks. Without the battery the GPS always cold-start so the initial GPS lock takes more time. The battery is automatically charged when power is applied and maintains data for up to two weeks without power.
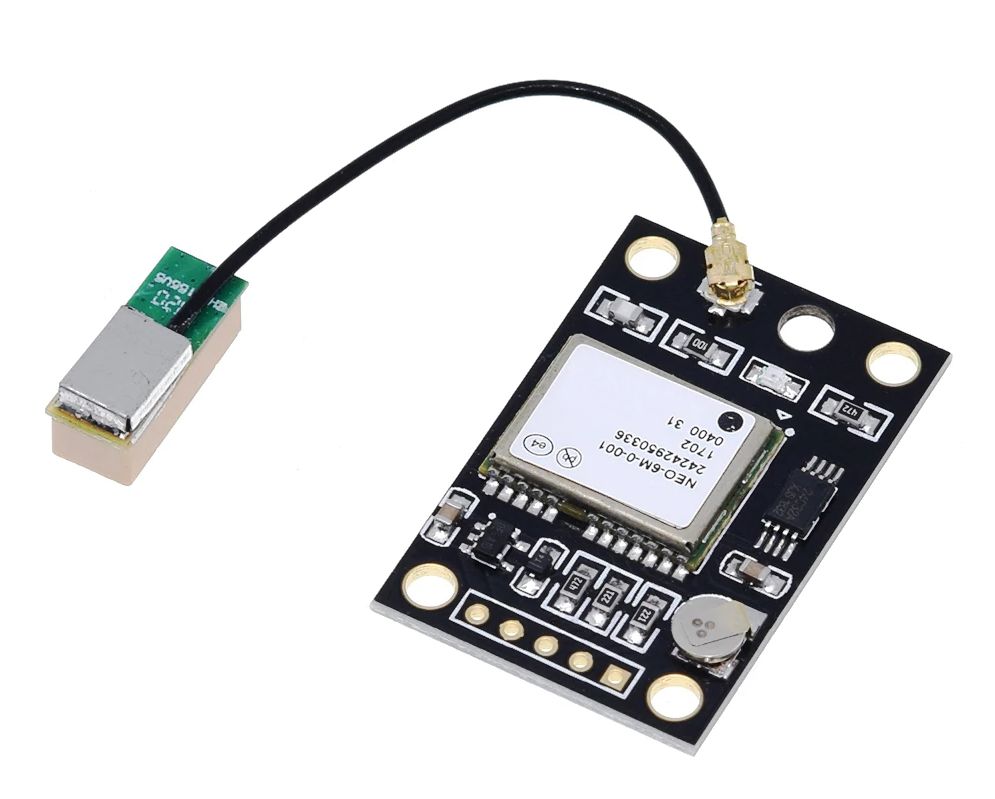
Antenna. An antenna is required to use the module for any kind of communication. So, the module comes with a patch antenna having -161 dBm sensitivity. The GPS antenna should be kept with the ceramic part upwards, looking to the skies! You can snap-fit this antenna to small U.FL connector located on the module. Patch antenna is great for most projects. But if you want to achieve more sensitivity or put your module inside a metal case, you can also snap on any 3V active GPS antenna via the U.FL connector. Please note that U.FL connectors are small, delicate and are not rated for strain. To prevent damaging the U.FL connection, we recommend threading the U.FL cable through the mounting hole, then attach the U.FL connectors.
Pins. There are four main pins: VCC, TX, RX, GND.
The NEO-6 module series is a family of stand-alone GPS receivers featuring the high performance u-blox 6 positioning engine. These flexible and cost effective receivers offer numerous connectivity options in a miniature 16 x 12.2 x 2.4 mm package. Their compact architecture and power and memory options make NEO-6 modules ideal for battery operated mobile devices with very strict cost and space constraints. The 50-channel u-blox 6 positioning engine boasts a Time-To-First-Fix (TTFF) of under 1 second. The dedicated acquisition engine, with 2 million correlators, is capable of massive parallel time/frequency space searches, enabling it to find satellites instantly. Innovative design and technology suppresses jamming sources and mitigates multipath effects, giving NEO-6 GPS receivers excellent navigation performance even in the most challenging environments.
Specification:
GPS Module NEO-6M
Model: GY-GPS6MV2
Input Supply Voltage Range: 3.3V-6V, on board voltage regulator maintains 3.3V
I/O Maximum Logic Level: 3.6V
WAAS (Wide Area Augmentation System) enabled GPS unit
<1 second to first fix (TTFF) for hot starts
27 seconds to first fix (TTFF) for cold starts
On board LED will blink after module acquires a position fix and will continue blinking as long as the module has a fix
50 Channel NEMA GPS receiver
UART: 9600 baud by default, but is configurable from 4800 to 115200 baud
5Hz max update rate
External EEPROM for configuration storage
Four plated mounting holes, 3mm in diameter
One additional non-plated mounting/antenna cable hole, 4mm in diameter
Position Accuracy: 2 m and better with multiple good satellite signals
Velocity Accuracy: 0.1 m/s
Maximum Velocity: 500 m/s
Heading Accuracy: 0.5 degrees while moving
On board battery for battery backed RAM (BBR). Battery is recharged through a simple diode and resistor charger circuit from the on board voltage regulator’s 3.3V output
Ceramic antenna
-156dBm Hotstart sensitivity
Weight: 17.6g (0.6oz)
Dimensions of GPS Module: 36mm (1.42in) x 25.8mm (1.02in) x 4mm (0.16in)
Dimensions of Antenna: 25.5mm (1in) x 25.5mm (1in) x 8.8mm (0.35in)
Compatible with various flight control modules that provide GPS computer test software
Compatible with UART capable devices including Arduino, Raspberry Pi, MSP430, and MSP432.
Interface: RS232 TTL
Power modes
Two continuous operating modes:
Maximum Performance Mode – continuously uses the acquisition engine, resulting in the best possible time to first fix (TTFF)
Eco Mode – optimizes the use of the acquisition engine to minimize current consumption
One intermittent operating mode:
Power Save Mode – draws only 11mA – Utilizes cyclic tracking, with configurable update periods, which reduces the average power consumption significantly
** This GPS module does not have onboard compass. You need to get one I2C (Compass) separately if your flight controller does not have one onboard.
You can find product datasheet here and schematic here. If you want to read more : Ublox 6 GPS Receiver and Protocol Description, Ublox_LEA 6_NEO 6_MAX 6 Hardware Integration Manual.
You can find this module M24C32-R (432RP marking) EEPROM datasheet here.
You can find this module voltage regulator MIC5205 (marked KB33) datasheet here.
Handling GPS Data
Once the GPS receiver has transmitted the NMEA sentences to the Arduino, and they have been properly read and stored in nice and “simple format”, then what follows?
There are several options to convert the “simple format” data into more general format (GPX, KMZ, etc.). For instance:
GPS Visualizer is a free online utility “that creates maps and profiles from geographic data”. You can input a CSV or tabbed file, a spreadsheet, or drag and drop the data. The appearance of the page is a bit odd but the content is good.
GPS Prune is intended to view, edit and convert GPS data. It allows to load text files as well as NMEA files, among quite a number of other options.
GPS Babel seems to be the most known GPS data converter. It reads text files with NMEA sentences.
U‑center GNSS evaluation software for Windows
The u‑center GNSS evaluation software for automotive, mobile terminal and infrastructure applications provides a powerful tool for evaluation, performance analysis and configuration of u‑blox GNSS receivers. Its unique flexibility makes the u‑center GNSS evaluation software an invaluable tool for evaluation, analysis and configuration of u‑blox GNSS receivers. u‑blox GNSS receivers can be configured using the u‑center evaluation software.
Highly interactive and easy to use
Full support of all u‑blox GNSS receivers
Extensive configuration and control features
Real‑time display from a GNSS receiver via RS232 and USB interface
See more details here.
Signals and connections of the NEO-6M GY-GPS6MV2 GPS module
The NEO6MV2 GPS module comes with 4 connections: RX, TX, VCC and GND, which is quite easy to incorporate with using SoftwareSerial on an Arduino Uno or a serial interface on an Arduino Mega. The power supply of the NEO6M should be 3.6V at max according to the datasheet. The typical China-produced breakout-boards contain a voltage regulator so that 3-5V VCC so it does not harm the board. Since the digital pins also produce 5V, the voltage divider is used on the receivers RX channel since this is not regulated.
RX (or RXD) – receive pin. Connected to Arduino board TX pin.
TX (or TXD) – transmit pin. Connected to Arduino board RX pin.
VCC – power supply. Can be connected to +5VDC or +3.3VDC pin of Arduino board.
GND – ground. Connected to Arduino board GND pin.
PPS – Pulse per second. This is an output pin on some GPS modules. Generally, when this pin toggles, once a second, you can synchronize your system clock to the GPS clock.
Aanvullende informatie
| Gewicht | 100 g |
|---|---|
| Afmetingen | 6 × 6 × 1 mm |









